Szerző: Lerch Krisztián
Mi a RECON? A RECON csupán egy koncepció, egy fantázia. Nem titkolt célunk, hogy a kész modell 2020 nyarán egy virtuális Mars missziót hajtson végre. Az elkészítésének a valós indoka azonban, hogy ez a kisméretű modellje legyen egy a jövőben megépülő nagyobb méretű rovernek (Big Recon). Ezen a kisebb járművön lesz az utódja megoldásai és a mozgásmechanizmusa tökéletesre kikísérletezve, megkönnyítve számunkra a majdani tervezés folyamatát. A Recon utódja egy teljes méretű rover lesz, ami minden tekintetben és funkcionalitásában egy a jelenlegitől jóval fejlettebb rendszerrel fog rendelkezni. Reményeink szerint a konstrukció be fog kerülni az űrkutatás világába, úgy mint egy alaposan kidolgozott koncepció. Természetesen addig még rengeteg tervezés, munka és tesztelés áll előttünk.
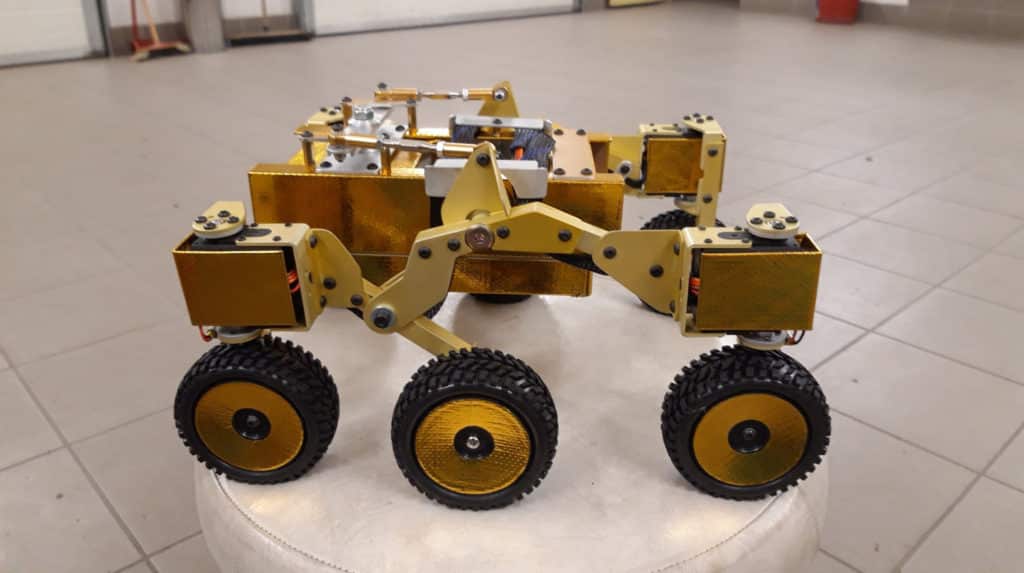
A Recon roverben már létező megoldások lettek alkalmazva. A futóművének az alapja egy régi ötleten, a „rocker-bogie” billenő-forgóváz felfüggesztési elrendezésen alapul, amelyet a NASA előszeretettel használt minden roveres küldetésében. Habár ez a konstrukció nem újkeletű, azonban még mindig ez az egyik legjobban használható futómű megoldás, amit valaha roverekhez alkalmaztak.

A kormányzott kerekek szintén nélkülözhetetlenek a rendszerben. A szerkezet elektronikai részei könnyen beszerezhető alkatrészekből lettek összeállítva, amiből egyenesen következik, hogy a végeredmény nem éppen űripari minőségű, azonban mindent elkövettünk annak érdekében, hogy annak a látszatát keltsük. Számunkra a megjelenés ugyanolyan fontos, mint a funkcionalitás. Hisszük, hogy a megjelenésének is tükröznie kell azt, amire tervezték. Egy kutató robot tervezésénél, fontos szempont, hogy a hajtáslánc, motorok, valamint szervók kifinomultan, megtervezetten mozogjanak. Haladási sebességében a „lassan, de biztosan” jelmondatot végig szem előtt tartva lett megtervezve. A rover nem lesz gyors, de nem is ez a cél. A cél az, hogy lassú mozgás mellett amennyire csak lehetséges biztosítva legyen a hat kerék stabil, csúszásmentes állapota.

Az első modell megközelítőleg 1/3 méretarányban lett megépítve, azért hogy a költségek minimalizálva legyenek. A hossza 32 cm, szélessége zárt panelok állásában 22 cm, míg nyitva 36 cm, magassága 28 cm. Tömege megközelítőleg 2200 g. A rover előre és hátra 46 fokig, míg oldalirányban 42 fokig dönthető borulás nélkül. A szerkezet anyaga teljes egészében alumínium, eltekintve néhány kisebb műanyag alkatrésztől.
Az alábbiakban a teljesség igénye nélkül kerülnek a rover komponensei felsorolásra:
Meghajtás, futómű:
Minden kereket elektromos motor hajt áttételezve. Maximális sebessége 0,5 fordulat (10,5 cm) / másodperc. A rover szélein lévő kerekek kormányozhatóak 140 fokban, ezáltal a rover egy helyben is meg tud fordulni. A futómű egy teleszkóptól, valamint rúgóktól teljesen mentes „rocker-bogie” megoldás. A teszteken használt kerekeket felváltották a végleges, 3D nyomtatott tömör kerekek, melyek alkalmasabbak a Mars terepviszonyaihoz. Ezen új kerekek tesztelése jelenleg folyamatban vannak.
Energiaellátás:
Az energiaellátásról 2 cella Li-Po 5000mAh 20C akkumulátor gondoskodik. Az akku töltését 3 db 18V-os solar panel fogja biztosítani, ami ideális esetben 650mAh-val képes tölteni.
Vezérlés:
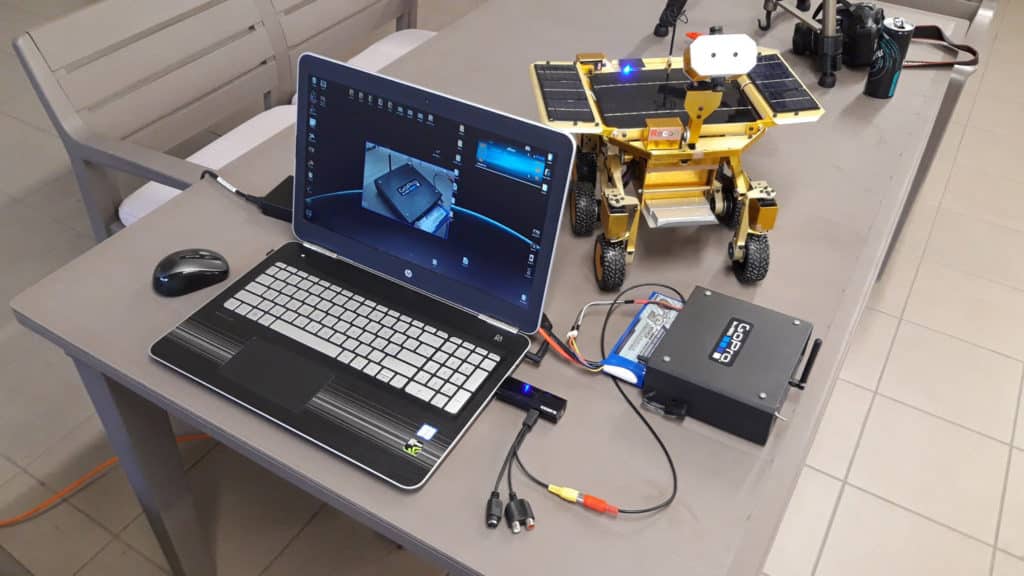
A vezérlést több eszköz is végzi majd. A kamerák és a különböző rendszerek bekapcsolását és kikapcsolását, valamint a telemetriai adatok rögzítését egy arduino MCU fogja végezni. Az irányításról pedig egy Hitec Aurora 9 fog gondoskodni PC vezérléssel.
Optikai eszközök:
A rendszer része 3 db kamera (1000TVL FPV Camera 3.6mm Wide Angle Lens), aminek videó képét az irányító központ fogja 5.8Ghz-en. Egy előre és egy hátra néző kamera a mozgatható állványzaton, végül egy kamera a robotkar végén, hogy közelről is meg lehessen vizsgálni a kőzeteket.
Kommunikáció:
Kétirányú kommunikáció fog megvalósulni több frekvencián is. Az arduino wifi-n keresztül a 2.4Ghz-es sávban valamint 433Mhz-en. A videó rendszer pedig 5.8Ghz-en és 1.2Ghz-en, illetve a Hitec Aurora 2.4Ghz-en.
Robotkar:
A teljes 3D mozgást lehetővé tévő robotkar, hat szervóval rendelkezik majd. A kar végén egy mikroszkóp kamera, LED világítás és egy kőzetfúró kap majd helyet. Ennek tervei jelenleg kidolgozás alatt állnak.
Összességében 6db motor, 16db szervó és 3db kamera lesz a rover-en. Az építés közben természetesen még sok részlet megváltozhat, de az irány adott.
A rover már túl is van az első komolyabb tesztjén, ami a szerkezet mechanikai tesztelése volt egy marsi felszínt szimuláló domborzaton. Próbáltunk változatos helyszínekkel, tereptárgyakkal létrehozni egy kis darabot a Marsból. A felhasznált anyagok összetétele, állaga, hasonló a Mars felszínéhez. A valóságban a NASA rovereit a Marson egy csapat mérnök jóval a rover előtt járva próbálja a legoptimálisabb útvonalon navigálni oly módon, hogy a manőverek a legkisebb kockázattal járjanak. Az általunk épített terep legtöbb eleme méretarányosan már vállalhatatlan kockázattal járna egy valós küldetésben, tehát valójában biztosan elkerülnénk azokat. A konstrukció célja nem a hatalmas akadályok megmászása, hanem a váratlan, szorult helyzetek leküzdése. A következő lépésekben az elektronika kiépítése és a robotkar valósul meg. A jelenlegi modell kis mérete miatt, csak korlátozott lehetőségeink vannak a különböző rendszerek roverbe való integrálására. Egyszerűen nincs hely mindennek. Fontos hangsúlyoznunk, hogy ez csak egy kisméretű modell, egy látványterv. Tisztában vagyunk a szerkezet hiányosságaival. Sajnos nem létezik tökéletes mechanikai konstrukció, de igyekeztünk a lehetőségeinkhez mérten a legjobb eredményt elérni. Már most rengeteget tanultunk és tapasztaltatunk, amit a következő modell tervezésénél és építésénél fogunk felhasználni.